The definition of average acceleration is:
![]()
According to this definition, the vector average
acceleration is obtained by dividing a vector by a scalar. Since the scalar (![]() ) is always positive,
this definition indicates that the two vectors (
) is always positive,
this definition indicates that the two vectors (![]() and
and ![]() ) have the same
direction. We would like to apply this definition to find the direction of the
acceleration at point D which is a turning
point. Then
) have the same
direction. We would like to apply this definition to find the direction of the
acceleration at point D which is a turning
point. Then ![]() and
and ![]() in the definition
correspond to an interval that spans point D,
i.e., an interval with an initial point just before point D and with a final point just after point D. The diagrams below illustrate this idea
graphically.
in the definition
correspond to an interval that spans point D,
i.e., an interval with an initial point just before point D and with a final point just after point D. The diagrams below illustrate this idea
graphically.
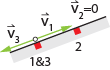 Suppose
that a ball rolls uphill along a straight track from point 1 to 2. Point 2 is
a turning point. Afterward, the ball rolls back downhill from point 2 to 3.
Points 1 and 3 are the same point. As the ball rolls uphill, it slows down.
As it rolls downhill, it speeds up. .
Suppose
that a ball rolls uphill along a straight track from point 1 to 2. Point 2 is
a turning point. Afterward, the ball rolls back downhill from point 2 to 3.
Points 1 and 3 are the same point. As the ball rolls uphill, it slows down.
As it rolls downhill, it speeds up. .
Recall that the change in velocity between the final point (point 3) and the initial point (point 1) is:
![]() .
.
This is equivalent to saying that ![]() is the quantity that
must be added to the initial velocity in order to obtain the final velocity:
is the quantity that
must be added to the initial velocity in order to obtain the final velocity:
![]()
 The
diagram at right shows the vector (the red vector) that must be graphically
added to vector
The
diagram at right shows the vector (the red vector) that must be graphically
added to vector ![]() to obtain
to obtain ![]() . Hence, the red vector
must be
. Hence, the red vector
must be ![]() .
.
According to the definition of average acceleration,
![]()
Since ![]() is a positive scalar,
the direction of the acceleration must be the same as the direction of the
change in velocity. The relative magnitudes of the
is a positive scalar,
the direction of the acceleration must be the same as the direction of the
change in velocity. The relative magnitudes of the ![]() and
and ![]() depends on the value
of
depends on the value
of ![]() .
.
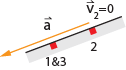 If the
interval is short enough, then the average acceleration for the interval is
equal to the instantaneous acceleration at the midpoint of the interval, point
2. This is illustrated in the diagram at right. Notice that the acceleration
points down the incline.
If the
interval is short enough, then the average acceleration for the interval is
equal to the instantaneous acceleration at the midpoint of the interval, point
2. This is illustrated in the diagram at right. Notice that the acceleration
points down the incline.
In summary, the acceleration at a turning point is not zero. It points down the incline.